-

南京斯托克机器人系统有限公司
主营:工业机器人离线编程软件,机器人虚拟仿真软件,机器人离线编程软件,工厂虚拟仿真软件,机器人3D视觉系统 - 18021502701

南京斯托克机器人系统有限公司
主营:工业机器人离线编程软件,机器人虚拟仿真软件,机器人离线编程软件,工厂虚拟仿真软件,机器人3D视觉系统 8
8
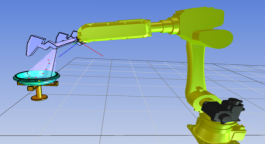
部分应用领域: 4.1切割 ?可以根据数模实际摆放位置进行3点定位 ?在仿真环境下进行机器人切割程序的编程 ?根据数模进行机器人的编程工作 ?切割程序的可行性验证,点位的修改,碰撞检测等 ?机器人切割仿真 4.2喷涂 ?完成喷涂机器人程序离线编程 ?喷涂可以根据不同类型的产品快速创建轨迹点 ?根据工件模型创建三次样条线轨迹,保证运动轨迹的均匀度 ?可以创建各种规则形状的轨迹线 ?喷涂效果的仿真验证 ?喷涂节拍仿真 4.3打磨 ?铜件、锌合金件打磨等卫浴行业机器人离线编程 ?现场设备位置标定 ?自动提取工件模型轮廓数据 ?进行打磨程序仿真验证及速度设定 ?验证打磨节拍机械加工 ?自动完成镗孔,平面铣削程序的编程 ?通过导入刀路轨迹生成机器人程序,用于零件加工 ?加工节拍仿真等。